
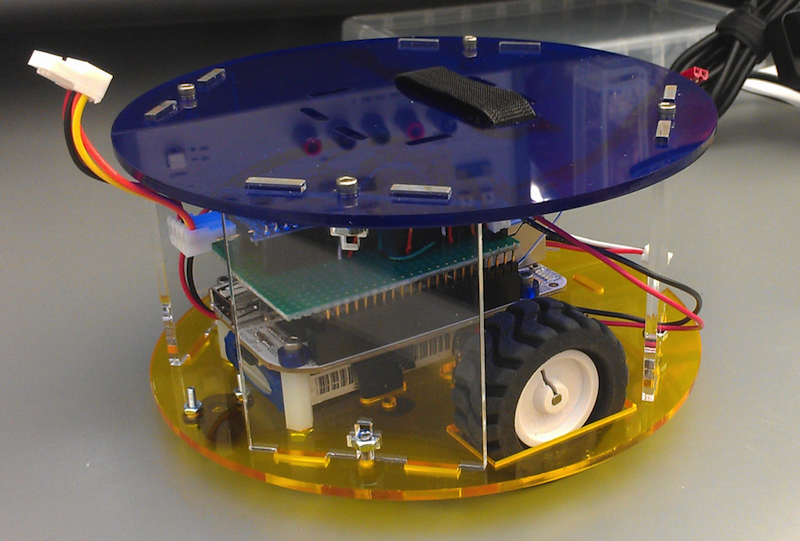
Robotic swarm involved the full desgin, engineering & manufacturing of multiple "swarm" robots (pictured). The chassis were manufactured using laser-cut acrylic. Each unit was equipped with a BeagleBoard for onboard computation, and an Arduino for lower-level control (motor/speed control).
These swarm robots were identified using APRIL tags (unique) via overhead camera, and can fulfill several different user-defined objectives.
Robotic Swarm
Project in conjunction with:
Robert Luan
Jared Porter
Dennis Wai
Ben Yee